定义介绍
发电机功角是发电机内电势与发电机端电压向量的夹角。当发电机功角为
时内电势与发电机端电压重合,应该是发电机全速未与系统并列。发电机功角时发电机发出有功并从系统吸收无功。发电机功角特性:其中上式中:P电磁功率,M相数,X同步电抗,θ功角,E电势,U机端电压。当原动机增加输入功率时,发电机的电磁功率也相应增加,正常运行的发电机只增加电磁功率时,其电势不变(励磁不变)机端电压不变(并列于系统),同步电抗不变。由以上公式可以看出,只有功角变大,才满足这个特性。在物理上可以这样理解:增加原动力时,转子加速,但由于同步运行的作用,使得转子的转速不可能脱开同步转速,而又回到平衡。但此时和电枢主磁通和转子磁极中心线不再是和刚才一样的角度,而是加了一个角度,即
。功角只有在间才符合这个特性。也就是度的值是0---1发电机在正常运行时,功角一般在左右,这是因为需要一个静稳定的冗余。因为也就是说一般发电机的静态稳定冗余为2。现代发电机因为有了较为先进的调节器,往往功角可以运行在较大的角度运行,甚至运行在功率因数为进相0.9运行,而保证不会失去静态稳定。这时候的功角大于.....根据以上公式大家可以进行分析。基本介绍
二者不是一回事。就是说,当无功等于零时,相角肯定是0的,但功角可以在大于负90°小于正90°之间,小于零度时是调相运行状态;而有功为零时,功角肯定是0°,而相角仍可以在负90°到正90°之间,大于零度时是迟相,小于零度时是进相。道理上应该是这样的。
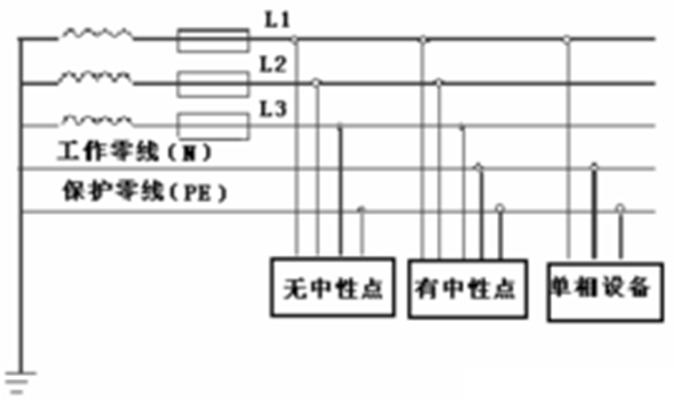
功角的测量,可以利用装于转子大轴上的霍尔传感器来感应转子磁场的角度(与定子电动势一致),以此为参照,再通过机端
感应出的机端电压(系统电压)与参照值相比较,其相位角度差,就是功角。有功负荷带得越高,汽机出力越大,功角拉得越开,越易失步,因为越过90°,就是滑极了。当然,励磁电流小了,不足以维持转子磁场,就是进相,励磁电流再小下去,使转子与定子间的电磁拉力减小,功角必然拉大,一旦越过90°,就会失步。所以,“转子磁场用于约束定子磁场的磁力线就不足。出力越大就越容易失步”是对的。
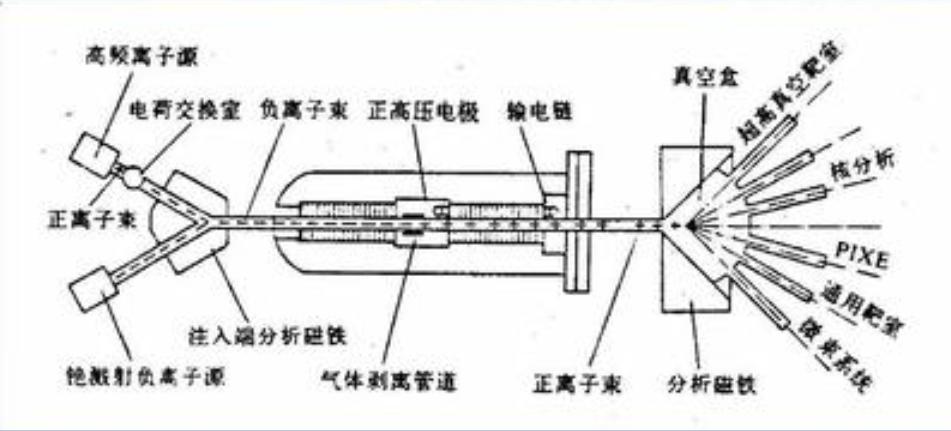
功角是表征同步发电机运行状态和判别电力系统稳定性的重要参量,多年来,功角的测量得到了广泛的重视和深入的研究。已有的测量方法从原理上主要有两大类:一类是纯电气测量方法,即采集同步发电机的输出电压、电流或/和其他电气量,进而通过理论分析和计算来获得功角。该类方法最简化的情况就是基于稳态公式或相量图的解析计算法,它在系统稳态运行且发电机的参数比较精确时,能比较准确地计算出功角,而在系统暂态过程中,由于参数时变性、机组铁心饱和等的影响,方法所依赖的解析公式不能成立,导致较大的计算误差。另一类方法需要借助非电量传感器(包含光电或磁电变换)来实现测量。常见的作法是,在转子轴上设置机械测点或测速齿轮,在转子周围安装光电、电刷或电磁装置,后者接收由前者产生的脉冲信号或其它与转子位置或速度相关的量,进而通过一定的变换来实现功角的测量(以下简称脉冲法)。脉冲法往往需要对发电机本体进行不同程度的改造,工艺复杂,而且由于采用非电量传感器,需借助于比较复杂的信号处理和误差补偿技术,以去除诸如机械加工误差、信号传输延时、轴体扭振等导致的结构性误差;而且针对个案提出的方法很难适用于别的发电机,导致实现代价较大。
瞬变状态测量
应用一个基于微处理器的负载角测量系统,来控制以逆变器送电的磁阻电动机,其电动机的起动,加载和卸载时负载角的测量控制流程可分为四段:
1 .PIA 的初始化用四个PIA ,其中两个连接在微处理器系统的输入端,输入负载角和电负载条件。另外两个接输出端,供负载角指示和磁极转差记录。
2.软起动一旦PIA 被初始化,逆变器输出频率以0.6H z 的步子增加,该步子对应于微处理器的一个十六进制数。当频率增加一个步子,中断标记被清除,处理器等待负载角中断信号读取负载角。负载角被存入存储示波器,在直观显示装置VDU 上进行目测时延量由逐个的频率增量组成,时延是可变的。上述处理工作反复进行直到达到规定的工作频率。起动频率大约为2Hz 。对于速度为1500 转/分钟的四磁极测试电动机,规定的工作频率通常为50Hz 。
3 . 在加载情况下的控制动作一旦电动机达到规定的速度,负载角在每一个电周期便被读一次。负载角显示于VDU 上,同时存入存储示波器。如果负载角超过基准值,误差便被计算,逆变器频率便下降。频率的下降量取决于误差信号的大小和比率控制器的增益。当负载角低于基准值时,控制动作不发生.
4 . 在完全去掉负载时的控制动作任何时候,如果负载完全去掉,这一情况被微处理机检出,控制动作返回延迟程序。如果逆变器频率和电动机速度不同于规定值,频率按“软起动”时的步子增加,直到达到规定的频率,此时负载角被连续不断地测量和记录。这个程序是用汇编语言编制的,占171字节的存储单元。实验结果是:控制起动,典型的控制起动过程,逆变器输出频率从2Hz上升到50Hz ,每步频率增量
对应着0.25 秒的延迟时间. 因定子电流没有超过额定值,程序为软起动;突然过载时的动作,当负载角超过预先规定的值时,逆变器输出频率下降,使电机免于失步,即电动机转子相对定子基本旋转磁场无磁极转差。这种磁阻电动机驱动装置的特征很具有吸引力,在多机驱动时,不会因为一个过载电机而失去同步性,而是引入降低逆变器频率的方法来保持其同步性。它还可以应用在自动化领域,是常规步进电机驱动过渡到高功率规划的一个可行方法。
性质介绍
功角可以理解为定子磁场与转子磁场之间的夹角,功角是一个角度,发电机额定正常运行功角一般在30°左右,在
之间功角越大发电机功率越大,但超过90°发电机外界受到扰动后就处于不稳定状态了,对于有自动调节励磁装置的发电机由于受暂态磁阻的影响发电机的功角特性曲线发生偏移,功角可以大于90°稳定运行。功角应该就是电动势与负载(系统)电压的夹角。